
Bio-Inspired Robots
What if robots could do the amazing things that elephant trunks and octopus tentacles do in nature? In the MED Lab our goal is to find out!
We do this through mechanics-based modeling, new mechanical design approaches, and new sensing techniques.
Our modeling work goes back many years. We one of several groups worldwide who led the charge to bring mechanics concepts into the field of robotics to create geometrically exact models that described large deformations in flexible robots, and are known worldwide as a leading group in this area of robotics science.
Recently we have been exploring using metals that melt at low temperatures (less than the boiling point of water) as a design element in robots, to enable robots to morph from very soft to very stiff.
We are also using curved tendons to move robot tentacles in a manner analogous to the curved muscle fibers in biological tentacles.
We are also working on some new sensing approaches that we are really excited about, but not quite ready to reveal publicly. But check back here in a few months, and read about them!
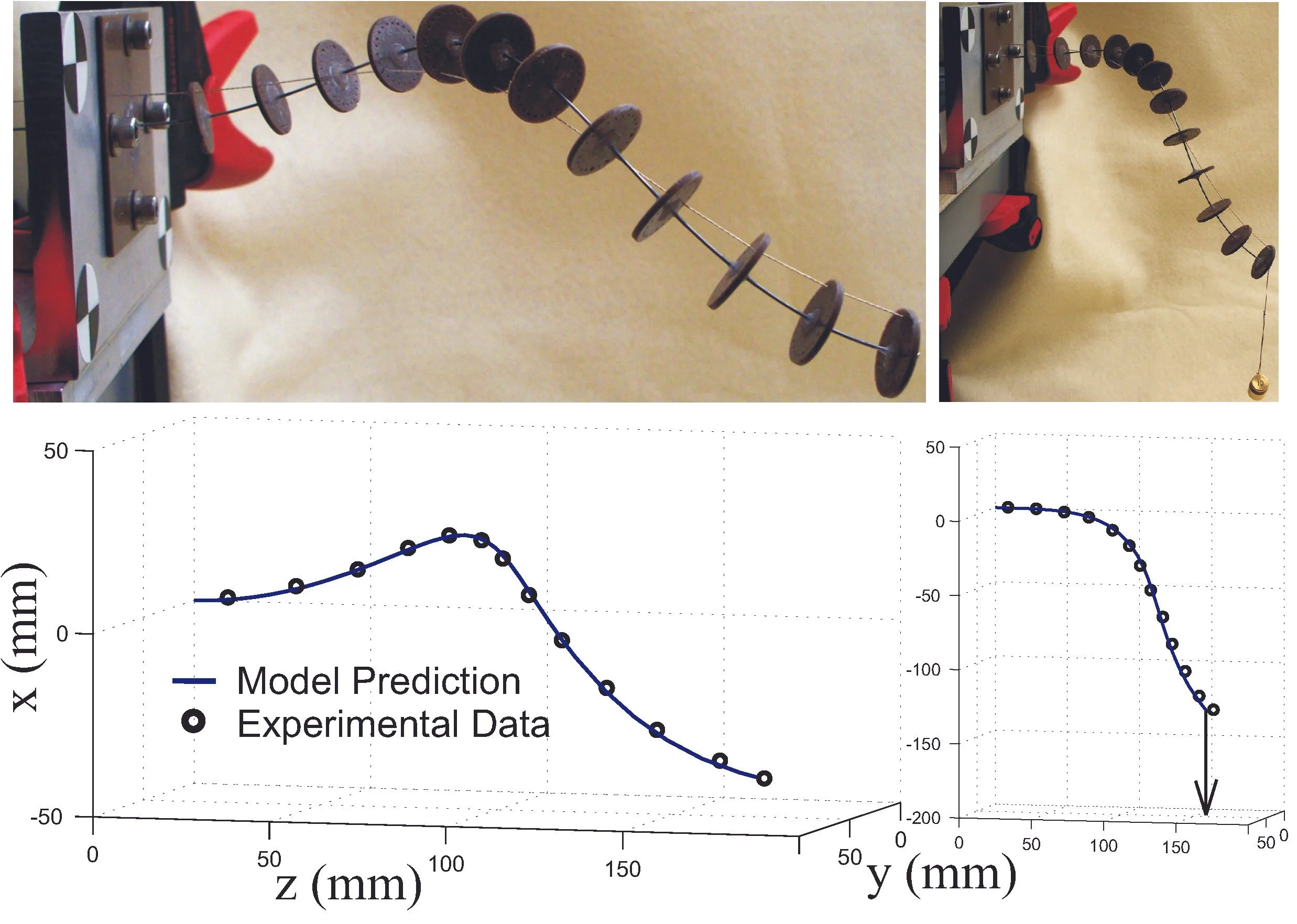
Our models can describe curved tendons inspired by the curved muscle fibers in biological tentacles and trunks. They can also describe how the tentacle bends when external forces are applied.
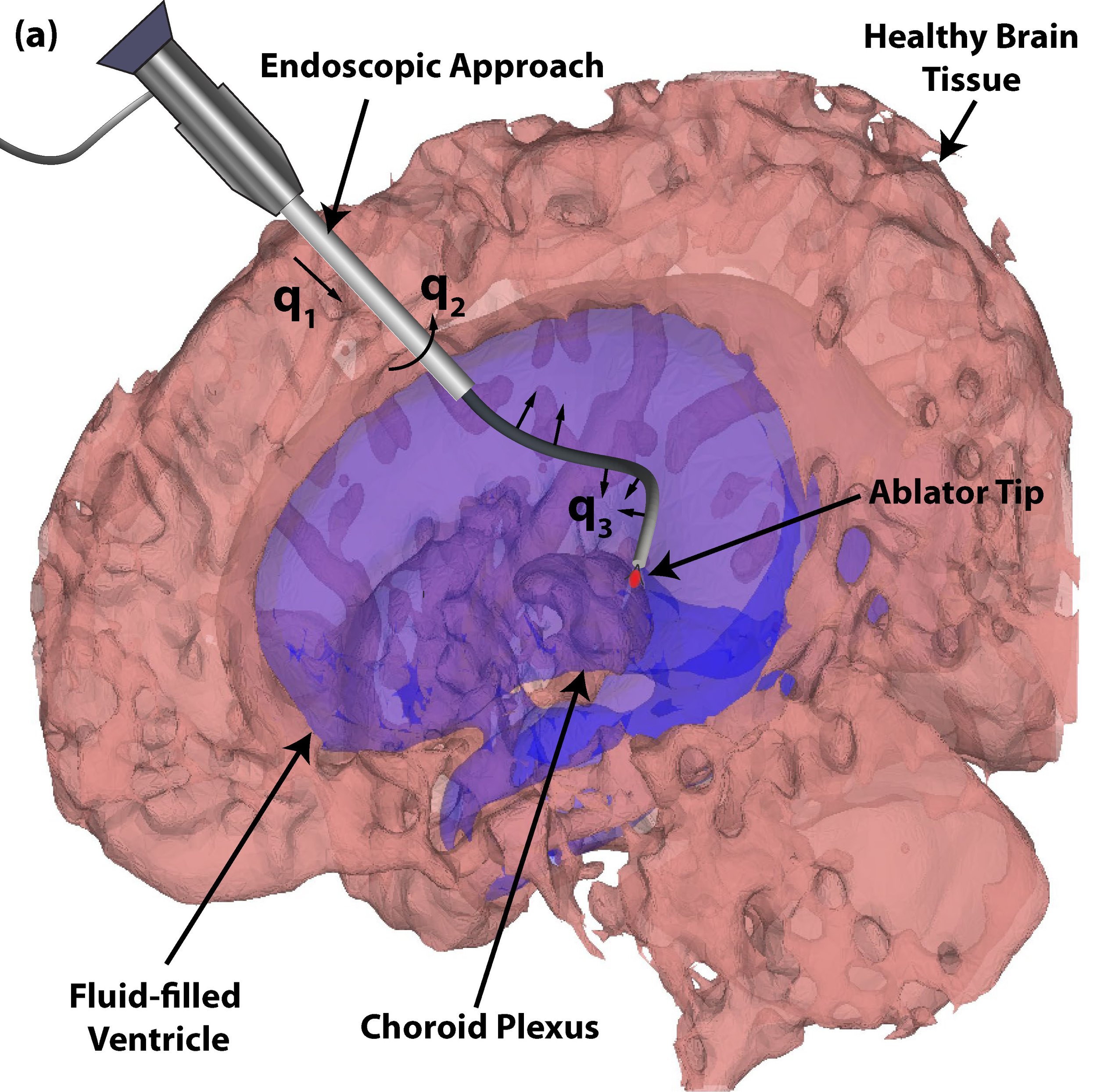
One application where curved tendons can help is reaching targets deep in the brain; they can help make the surgical device small, yet dexterous.
Related Publications:
D. C. Rucker and R. J. Webster III. Statics and Dynamics of Continuum Robots with General Tendon Routing and External Loading. IEEE Transactions on Robotics, 27(6):1033-1044, 2011.
B.Y. Cho, J. Thompson, B. Thach, D. Esser, R. J. Webster III, A. Kuntz. Accounting for Hysteresis in the Forward Kinematics of Nonlinearly-Routed Tendon-Driven Continuum Robots via a Learned Deep Decoder Network. Robotics and Automation Letters, 2024.
E. McCabe, D. S. Esser, T. E. Ertop, A. Kuntz, and R. J. Webster III, Combining Thermoelectrics and Low Melting Point Alloys to Create Reconfigurable Stiff-Compliant Manipulators, In 7th IEEE-RAS International Conference on Soft Robotics, 2024.
D. Esser, T. E. Ertop, E. McCabe, F. Maldonado, E. Gillaspie, A.Kuntz, and R. J. Webster, III, A Continuum Lung Stapler Leveraging Phase Changing Metal for Dexterity and Stiffness, In The Hamlyn Symposium on Medical Robotics, 2024.